- Welcome to Pulse Robot
- +86-23-63207381
- +8613677602178
- sales@pusirobot.com
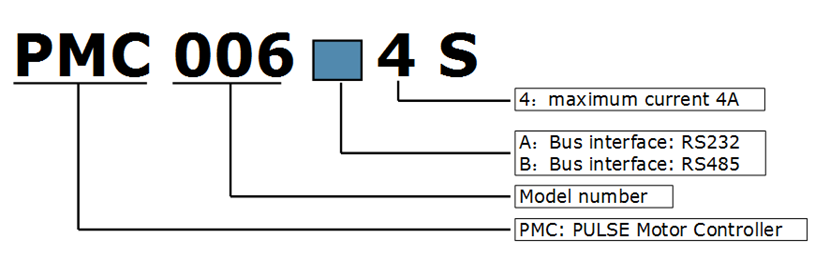
Micro stepper motor controller PMC006B4

PMC006B4
√ wide range of 9-36v single voltage supply
√ output current 0.3-3A ,which can be adjusted continuously
√ support 0/2/4/8/16/32/64/128 microsteppering accuracy
√ support 4/6/8 lines of 2 phase stepper motor
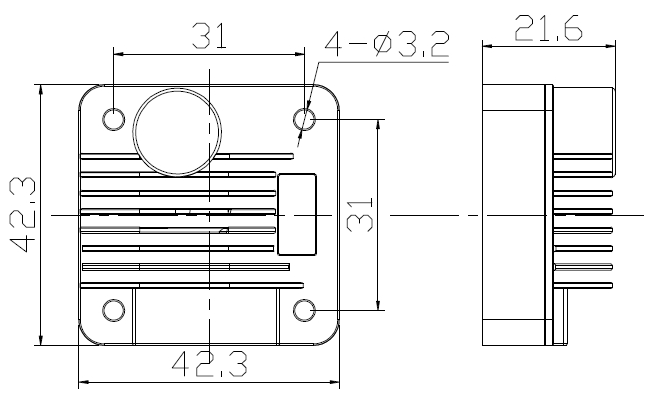
√ Miniature size 42mm*42mm*21.6mm

Description
PMC006B4 is a kind of miniature integrated stepper motor microstepping controller, which can be directly installed in the rear of 42/57 etc series stepper motor. The series controller is controlled by RS485 bus. It is easy to achieve industrial control network of as many as 120 nodes by using PMC006B4 controller, which would have excellent noise suppression and excellent motion smoothness. PMC006B4 provides a simple and rich set of control commands, which not only greatly simplifies the complexity of the upper layer control system, but also maximally reserves flexibility of control, and is especially suitable for various industrial applications that require low vibration, high precision and wide voltage range.
Technical data
General
|
PMC006 bus series
|
|
| Host |
PC,PLC,MCU
|
| Support motor |
2-phase stepper motor
|
| The development environment |
VC C# Labviwe VB Linux Python
|
| The power supply voltage |
DC 9-36V
|
| Output Current |
DC 4A |
| Microstepping |
0/128 adjustable
|
| Temperature |
-20℃-80℃
|
| Maximum pulse frequency |
16K
|
| Durability |
Over 20,000 hours
|
The input
| General I/O |
Description
|
| IO function |
Emergency stop input, brake control, digital input/output, analog input, factory reset, 5V output
|
| The input specifications |
Digital input voltage: 0-5v |
Communication
|
Description
|
|
| Protocol |
RS485
|
| Baud rate |
9.6 k bps adjustable
|
Demension
Download
| CAD |
.DWG
|
| 3D file |
.STP
|
| The user manual | |
| Debug software | |
| Development of the document | |
| Certificate |
Selection guide
Functional features
| Function |
Description
|
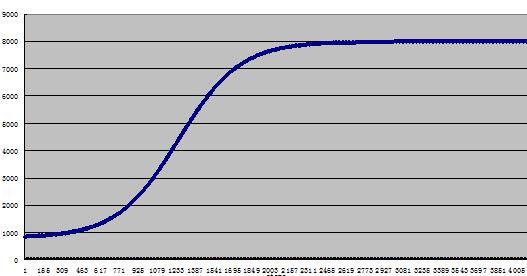
| S-curve acceleration and deceleration automatic control |
Support separate configuration of starting speed, stopping speed, acceleration and deceleration. Acceleration and deceleration support 8-gear control. Acceleration and deceleration simulation diagram is as follows
|
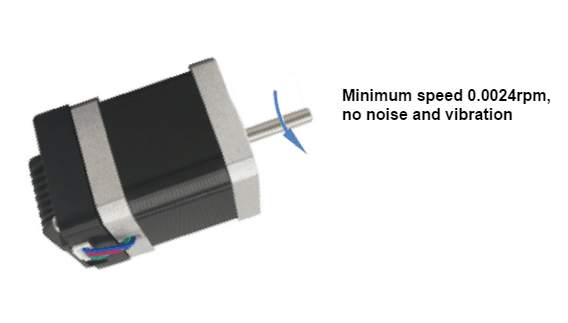
| Low speed, low noise and low vibration |
The controller supports 128 subdivision, pulse frequency 1pps control motor stable operation
|
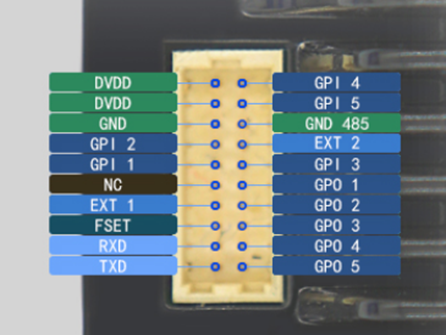
| 20 universal IO's |
The controller adopts 20P integrated signal terminal, including 10 general IO and various functions to control the input and output
|