- Welcome to Pulse Robot
- +86-23-63207381
- +8613677602178
- sales@pusirobot.com
What parameters do you need to know when choosing a stepper motor?
When choosing a stepper motor for a device, the most important parameters we often mention are two: load torque and motor speed.
Next, we will discuss the application of load torque and running speed in the actual design of the equipment by taking the integration of the Micro stepper motor controller of the PULSE robot.
First of all, what is the load torque? The load torque is the torque required when the stepper motor drives the load.
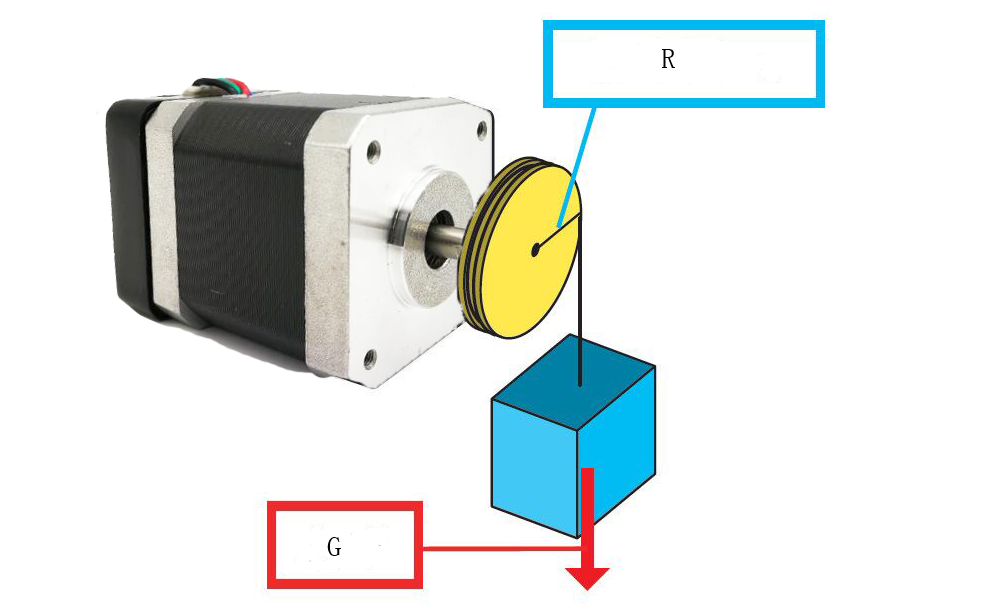
Taking the above figure as an example, the torque is the product of the force [F] and the radius of rotation [r]. If the force is 10N, the radius of rotation is 5cm.
Torque = 10N × 0.05m = 0.5N·m. In the above example, 10N can lift about 1 kg of objects. The force associated with the load torque is generally gravity or friction (as shown below).
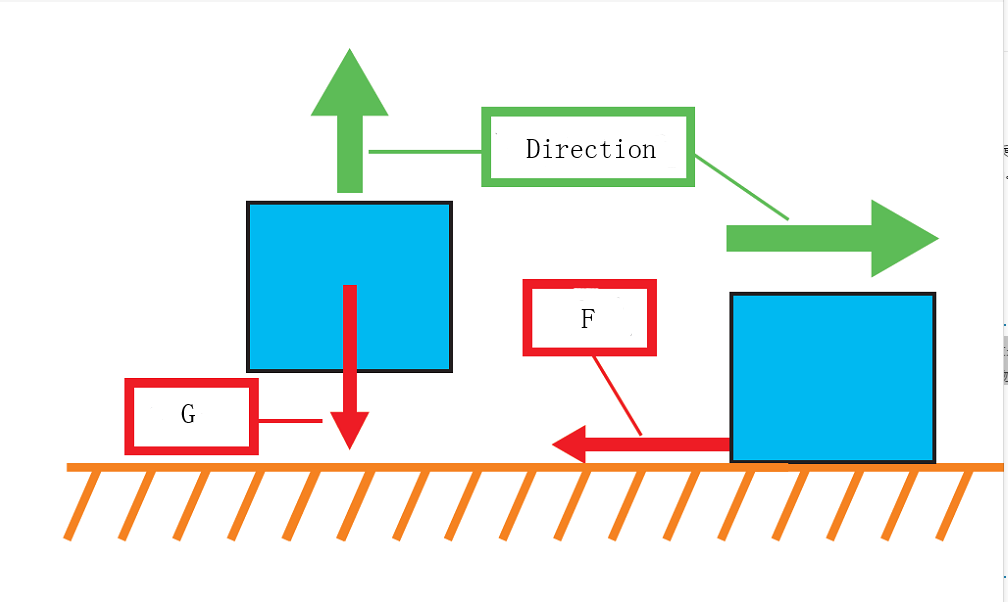
It is well known that gravity is related to the quality of objects. The friction is also proportional to the mass of the object. These forces that require the motor to output torque and drive are load torques.
Application case: conveyor belt
As shown below:
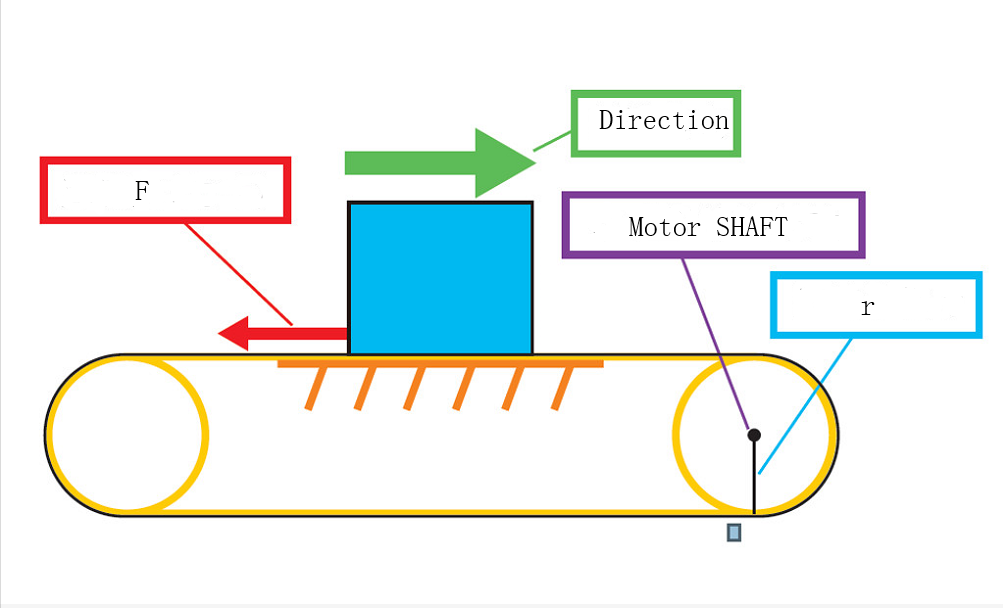
The force [F] of the belt mechanism is the friction force, and the radius of rotation [R] is the radius of the roller. If the object to be transported is heavier, there is a certain requirement for the output capability of the motor and the transmission mechanism. There are many examples of load torque applications, which are introduced here first.
Running speed:
Very simple, it refers to the maximum speed of the stepper motor when the device is running under normal conditions. Take the closed-loop integrated stepping motor assembled by the Micro stepper motor controller of the PULSE robot as an example. As we all know, the load torque of the stepper motor is inversely proportional to the speed. Therefore, after determining the load torque, determine the running speed and pay attention to reserve a margin of 1.5-2 times to determine the specific model of the stepper motor. Our torque frequency curve is shown below. :
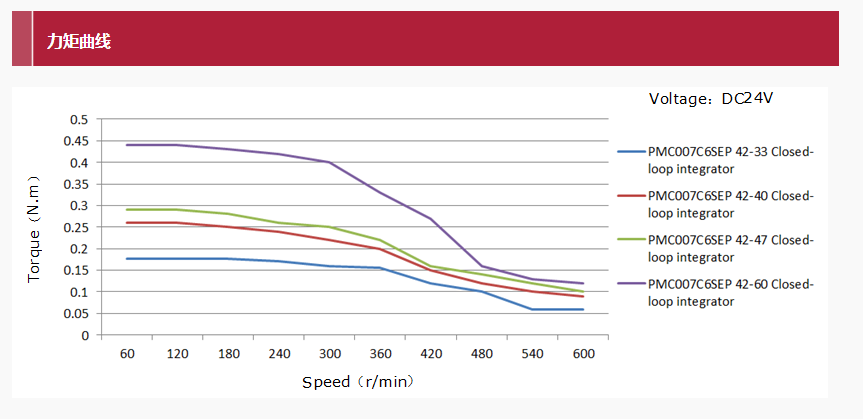
According to the required load torque and running speed, have you adapted the suitable motor?