- Welcome to Pulse Robot
- +86-23-63207381
- +8613677602178
- sales@pusirobot.com
Regular Positioning Mode of Stepping Motor
Regular Positioning Mode of Stepping Motor
Stepping motors have fixed step angle, such as two-phase stepping motors. The step angle is 1.8 degrees. That is to say, every time a pulse motor axis from the control system rotates 1.8 degrees, the conventional positioning method can control the angle of the axis rotation by controlling the number of pulses from the upper computer. Combined with the relevant mechanism, the conventional positioning method can be realized by position control. The components of the conventional positioning method are generally composed of controllers.( Single Chip Microcomputer, PLC, Computer, Driver and Motor, Realize Motor Positioning by Programming Controller
Analog Positioning of Stepping Motor
In some simple application scenarios, users do not want to realize positioning control by programming, such as position control of electric valve, remote manual adjustment and positioning of camera camera, etc. Using PMC007 series closed-loop integrated stepper motor provided by Spectrum, analog positioning control of stepper motor can be easily realized.
Realization scheme:
1. Implementation of analog input
The following drive-control closed-loop integrated machine
The composition is shown in the figure.
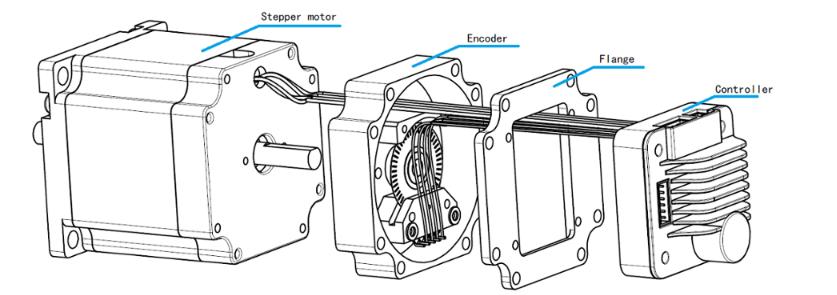
The controller has analog input port, which can realize analog input only by wiring.
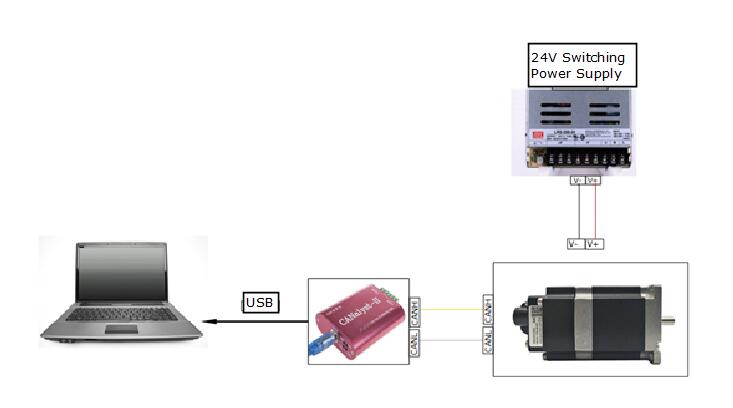
2. Realization of analog control:
The following picture shows the controller object.

The controller has its own drive and control function. The program written on the computer can be saved offline through the following wiring:
Using self-contained debugging tools to realize off-line control program of analog quantity:
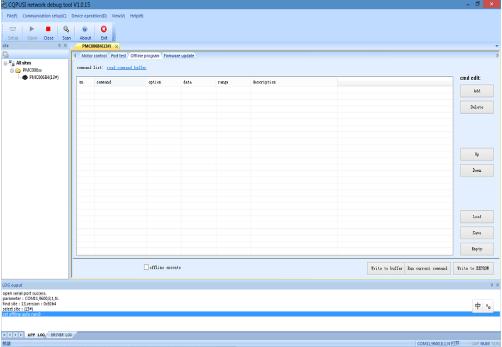
The program is saved in the controller after compiling. The analog positioning of the motor can be realized by connecting the analog input signal line to the power supply of the motor. Combined with the position feedback function of the encoder, the problem of step loss of the open-loop stepping motor can be avoided and the closed-loop control can be realized.