- Welcome to Pulse Robot
- +86-23-63207381
- +8613677602178
- sales@pusirobot.com
PUSI CAN Bus Stepper Motor Computer Shunting Flow
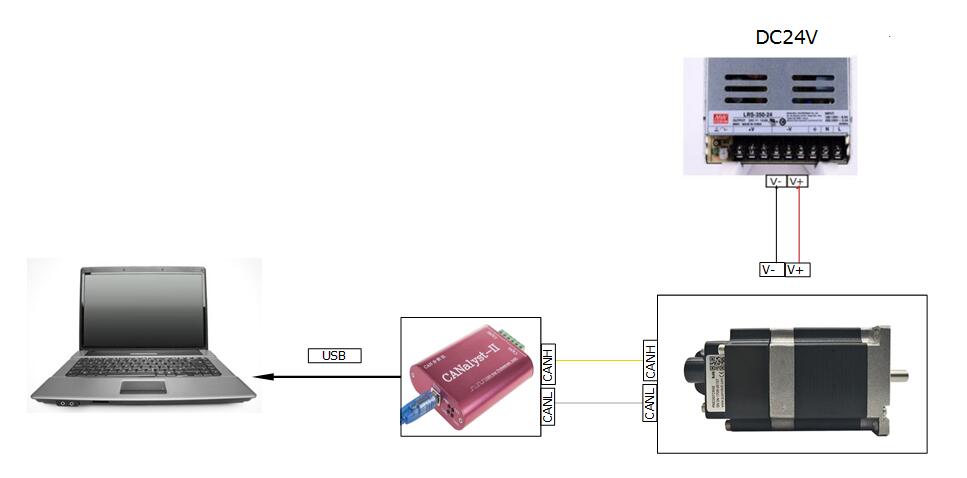
1. Wiring
PMC007 Step servo motor Canopen bus stepper motor wiring is completed in power-off state as shown in the following figure. Note that all terminals must be connected in power-off state, not live plug-in.
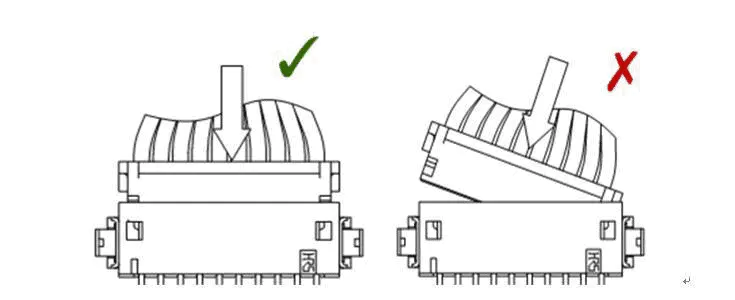
PMC007 Step servo motor Canopen bus stepper motor uses Japanese HRS 10P precise small spacing connector. When inserting, it is necessary to use appropriate angle and strength. Improper insertion angle will lead to terminal bending deformation. As shown in the following figure:
2. Debugging software operation steps
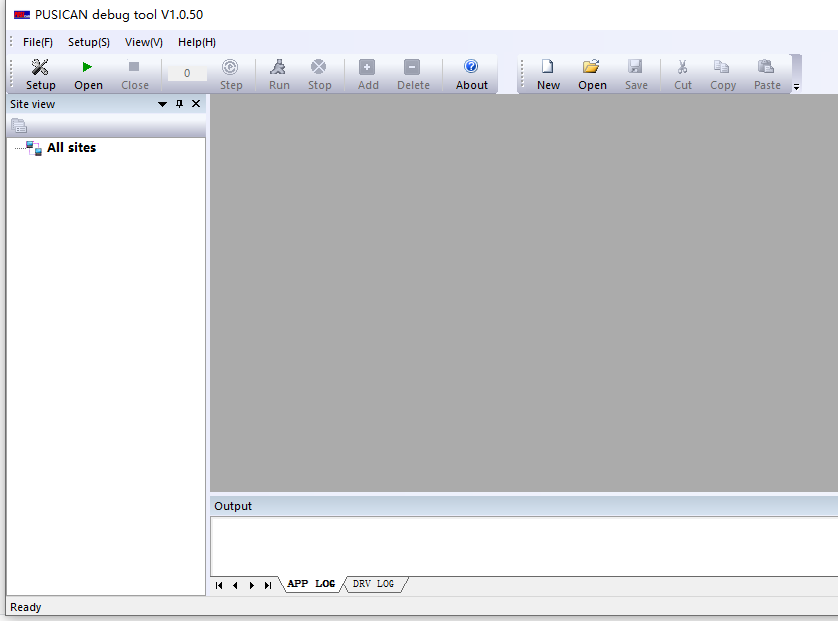
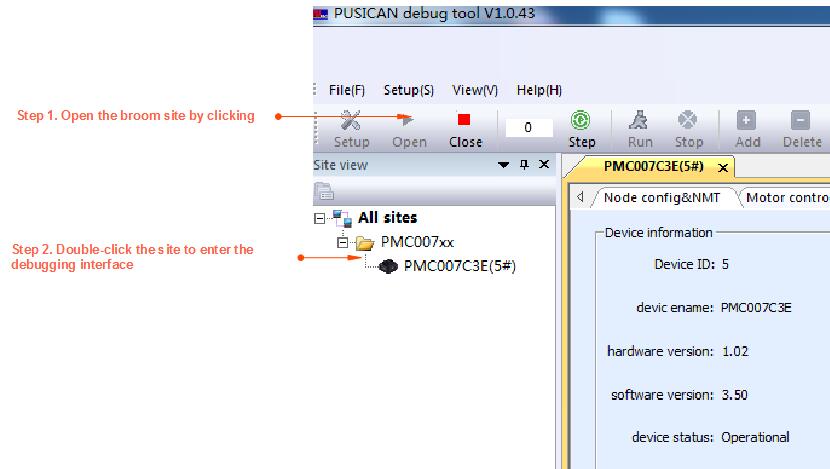
2.1 Open PUSICAN debugging tool software after power-on:
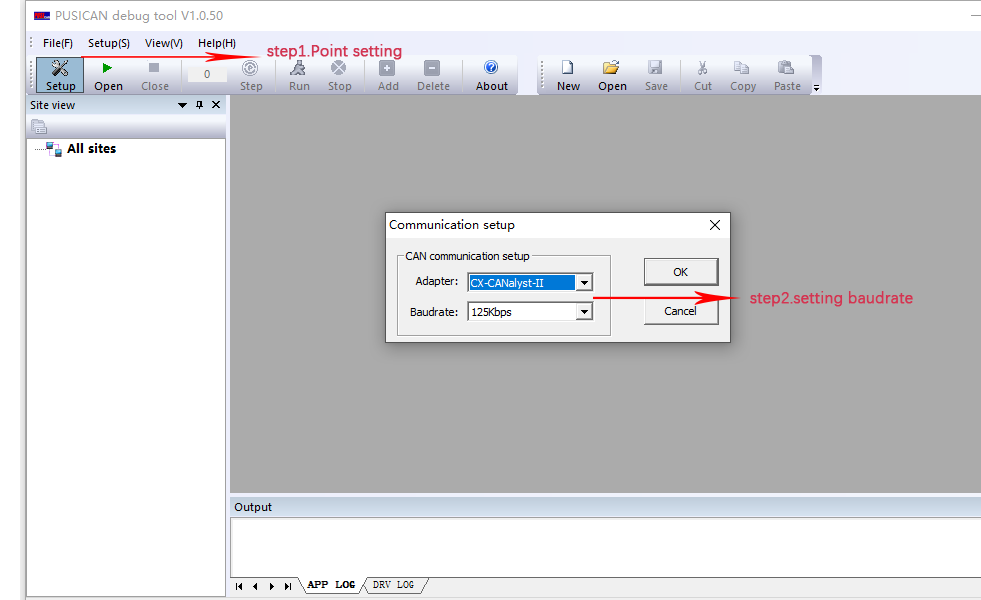
2.2 Serial Port Settings
2.3 Enter debugging interface
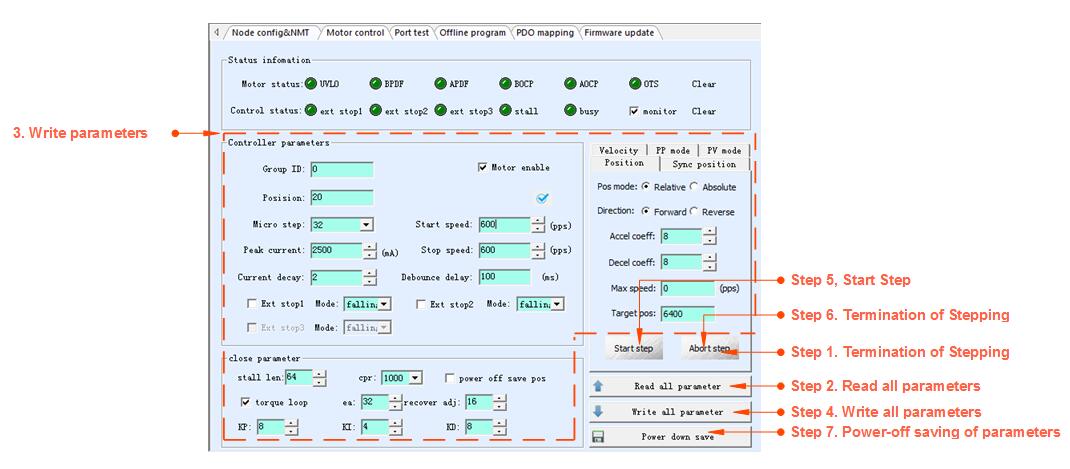
2.4 Parameter Setting Steps
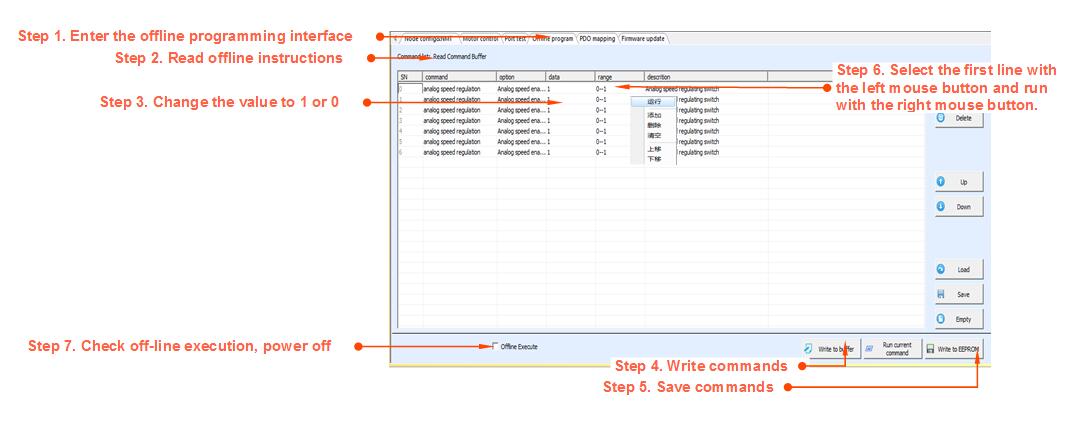
2.5 Steps to Set the Running Direction of Out-of-Thread Sequence Change
3 Recommended settings for each parameter
|
Parameter |
Range |
Recommended values |
Power-off Preservation |
Explain |
|
Microstep |
0~256 |
32 |
Y |
|
|
Current steps |
0~2147483648 |
No settings required |
N |
Set to 0 only after finding zero bits |
|
Rotational speed |
0~200000pps |
According to actual working conditions |
N |
Unit conversion should be less than 300 RPM |
|
Velocity Compensation Factor |
0~2000 |
No settings required |
Y |
Please amend it with the support of technicians. |
|
Current Compensation Factor |
0~500 |
无需设置 |
Y |
Please amend it with the support of technicians. |
|
Start-up speed |
65~3000 |
600 |
Y |
Must be less than rotational speed |
|
Stop speed |
65~3000 |
600 |
Y |
Must be less than rotational speed |
|
Acceleration coefficient |
0~5 |
8 |
Y |
The higher the value, the faster the speed increases. |
|
Deceleration coefficient |
0~5 |
9 |
Y |
The larger the value, the faster the speed decreases. |
|
Maximum current |
300~4000 |
|
Y |
Setting according to motor rated current |
|
Automatic current attenuation |
0,1 |
1 |
Y |
Normally, you need to check it out. |
|
Automatic attenuation factor |
0~3 |
1 |
Y |
The larger the value, the smaller the standby current, usually not 0 |
|
|
|
|
|
|
Note: After all parameters are written, all parameters can be read again to verify whether the parameters are written or not.