- Welcome to Pulse Robot
- +86-23-63207381
- +8613677602178
- sales@pusirobot.com
The difference between closed loop and open loop of stepper motor
The control method of stepper motor is generally divided into two control methods: open-loop control and closed-loop control. The simplest control method for open-loop control of stepping motor is the Ding-loop control system. In this control mode, the stepping motor controls pulse the input does not depend on the position of the rotor, but instead sends out its control pulses according to a fixed rule. The stepper motor only relies on this series of established pulses to work. This control method is more suitable due to the uniqueness of the stepper motor for controlling stepper motors.
What is a closed-loop stepper motor?
Closed-loop control is a basic concept of cybernetics. Refers to a control relationship in which the controlled output returns to the control input terminal in a certain way and exerts control influence on the input terminal. The closed-loop control of the stepper motor uses position feedback and/or speed feedback to determine the phase conversion adapted to the rotor position, which can greatly improve the performance of the stepper motor.
In a stepping motor system with closed-loop control, the working speed range can be expanded when tracking and feedback with a given accuracy, or the tracking and positioning accuracy can be improved at a given speed, or the limit speed index and limit can be obtained Precision index.
Control method of closed-loop stepper motor
The closed-loop control methods of stepper motors are roughly divided into two types:
1. Keep the phase relationship between the excitation flux and the current consistent, so that it can generate electromagnetic torque that can drive the load torque. This method of controlling the motor current is the same as the brushless DC motor control method, called the brushless drive method or Current closed-loop control method.
2. The motor current is kept constant and the method of controlling the phase angle of the exciting magnetic flux and the current is called the power angle closed-loop control method. The power angle is the phase angle formed by the mutual attraction between the rotor poles and the stator excitation phase (or the axis of the stator rotating magnetic field of a synchronous motor). This power angle is smaller at low speed or light load, and larger at high speed or high load. As shown in the following figure in the principle of open-loop control in the previous article, the "bar A" phase attracts the rotor pole, and the angle of the "bar B" phase is π/2 when the phase is excited, and the rotor pole is located at the leading edge of the "bar A" phase ( When the S pole of the rotor is located on the left side of phase A), the magnetic pole "bar B" phase starts to be excited.
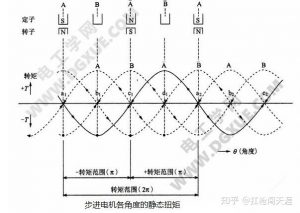
why? Because at high speed, affected by the coil inductance, the turn-off time of the A-phase current is prolonged, and the rise time of the B-phase current is also prolonged. Therefore, the angle that produces the maximum torque acceleration increases with the speed.
Closed loop stepper motor working principle diagram
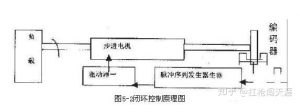
This control method is to directly or indirectly detect the position or speed of the transfer (or load), and then through feedback and appropriate processing, the drive pulse sequence of the stepper motor is automatically given. This drive pulse sequence is based on the load or There are many realization methods of this control mode that the position of the rotor changes at any time. In the occasions that require high precision, the combination of micro-step drive technology and microcomputer control technology can achieve high position accuracy requirements.
Advantages of closed-loop stepper motors
a. As the output torque increases, the speeds of both will decrease in a non-linear form, but the closed-loop control improves the torque-frequency characteristics.
b. Under closed-loop control, the output power/torque curve can be improved. The reason is that under closed-loop, the motor excitation conversion is based on the rotor position information, and the current value is determined by the motor load. Therefore, even in the low speed range, the current It can also be fully converted into torque.
c. closed-loop control, the efficiency-torque curve is improved.
d. Adopting closed-loop control, it can get higher operating speed, more stable and smoother speed than open-loop control.
e. Using closed-loop control, stepping motors can be automatically and effectively accelerated and decelerated.
f. The quantitative evaluation of the improvement in the rapidity of closed-loop control relative to open-loop control can be obtained by comparing the time of passing a certain path interval in step IV:
g. Using closed-loop drive, the efficiency can be increased to 7.8 times, the output power can be increased to 3.3 times, and the speed can be increased to 3.6 times. The performance of the closed-loop drive stepper motor is better than the open-loop drive stepper motor in all aspects. Stepper motor closed-loop drive has the advantages of stepper motor open-loop drive and DC brushless servo motor. Therefore, in a position control system with high reliability requirements, closed-loop control stepping motors will be widely used.
What is the difference between open loop and closed loop of stepper motor
1. Just let the other party execute the open-loop control content. No feedback. Closed-loop control needs to be executed by the other party and reported to you. Have feedback.
2. Whether it is effective for the current control. Open-loop control is generally a control activity completed in an instant, and closed-loop control will continue for a certain period of time, which can be used to judge.