- Welcome to Pulse Robot
- +86-23-63207381
- +8613677602178
- sales@pusirobot.com
How to choose a suitable stepper motor control system
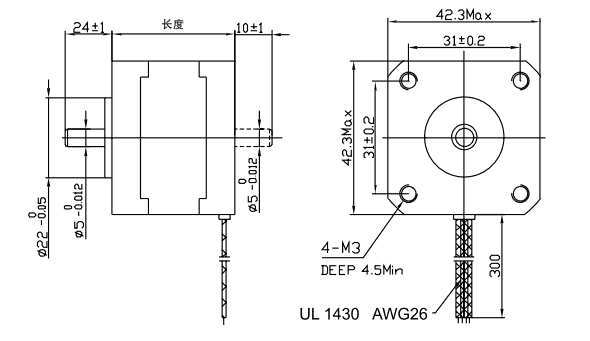
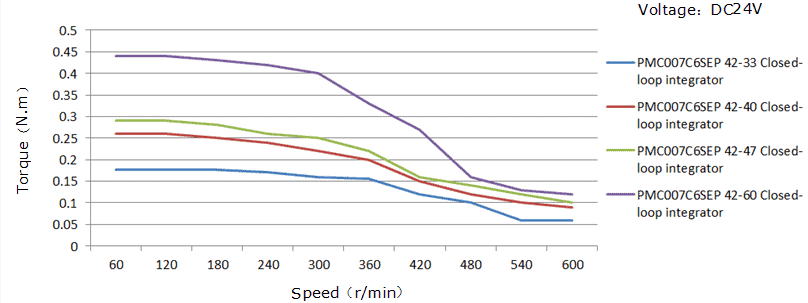
Motor selection: Stepper motors are generally classified according to the number of phases, and then are classified by motor size. Commonly used sizes are 28, 35, 42, 57, 86 motors. For example, the most commonly mentioned 57-76 stepper motor means that the motor width is 57mm. , The length is 76mm, the left of the figure below is a 42-step drawing, the larger the motor size, the greater the output torque at the same speed; the running speed of the stepper motor is not constant, so there is no such thing as rated power, and the output torque of the motor shaft As the speed increases and decreases, the general motor manufacturer will have the frequency torque curve of the motor, as shown on the right in the figure below. Therefore, when selecting models, we need to provide the application scenarios on the equipment. If we can accurately provide the application speed and the required torque, we can quickly choose what size motor to use
Drive selection: The choice of stepper motor driver is generally determined by the upper control system. The more traditional drivers only have pulse amplification and need the upper computer to send out pulse signals. At present, the more technical products on the market are generally integrated drive and control products with small size The stepper motor driver can amplify pulses and receive bus input signals at the same time. It also has some controller functions. It can write some simple control programs for offline execution, eliminating the need for the upper computer. If the device has a large number of axes and requires a motor Can respond quickly, generally recommend this kind of small stepping motor driver drive controller. Therefore, when selecting the driver, it is necessary to provide information such as the number of equipment axes, related control requirements and the model of the host computer.
Whether to connect the encoder: The so-called open-loop control is a stepping system without an encoder. No matter whether the desired control effect is achieved, the motor will rotate according to the existing instructions, and the control will be inaccurate. Generally, the control accuracy requirements are not particularly high. You can choose ; The stepping system with encoder is closed-loop stepping control. The encoder can monitor the rotation of the motor shaft in real time and feedback the signal to the drive controller. The controller adjusts the drive current according to the feedback signal to prevent step loss while allowing the motor The output torque is greater, and it can also make the stepper motor reach a higher speed The following figure shows a highly integrated stepping control system, which integrates the motor, encoder and drive controller into one, greatly reducing the size of the stepping system and optimizing the system steps
