- Welcome to Pulse Robot
- +86-23-63207381
- +8613677602178
- sales@pusirobot.com
Integrated closed-loop stepper motor analog positioning solution
The conventional positioning method of a stepper motor is to determine the angle of axis rotation by controlling the number of pulses sent by the host computer. Its components are generally composed of a controller (microcontroller, PLC, computer), driver and motor. The motor is realized the positioning function by programming the controller.

However, in some simple application scenarios, users do not want to achieve positioning control through complex programming of the host computer, such as the position control of electric valves, use the PMC007 series closed-loop integrated machine provided by PUSI, which integrates drive control and comes with analog input It can easily realize the analog positioning control of the stepper motor only by wiring.
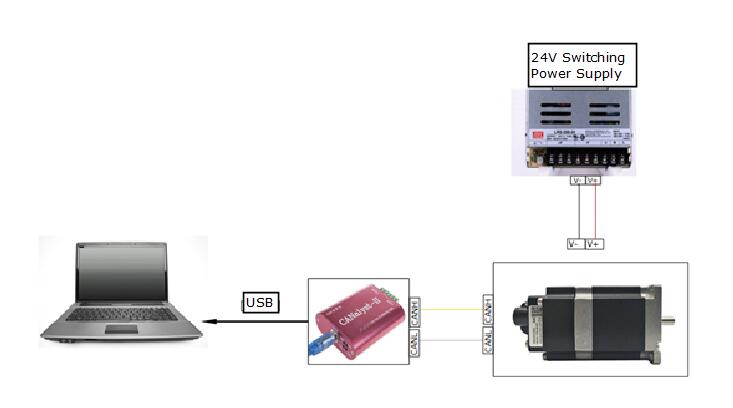
Through the above wiring method, and using the PUSICAN debugging tool that comes with PUSI, the programming of the analog quantity offline control program can be realized.
After the offline program is written and saved in the controller, the analog input signal line is connected and the motor is powered to achieve analog positioning, and combined with the position feedback function of the closed-loop integrated machine encoder, it can avoid the stepping motor from losing steps Fully closed loop control