- Welcome to Pulse Robot
- +86-23-63207381
- +8613677602178
- sales@pusirobot.com
How to wire the CAN bus to avoid abnormal communication
How to wire the CAN bus to avoid abnormal communication
CAN bus was originally designed by German BOSCH for monitoring and control in the automotive industry. It has been applied to railways, transportation, national defense, engineering, industrial machinery, textiles, agricultural machinery, numerical control, medical equipment robots, buildings, security, etc.
So in practical applications, when using CAN communication protocol for communication, irregular wiring will cause a significant decrease in communication reliability, stability and accuracy of data transmission, and sometimes even lead to some unexpected phenomena. Therefore, it is recommended to strictly follow the CAN network wiring specifications for engineering construction to reduce the later maintenance workload.
- Only one application layer protocol can run on a CAN bus, and it is not compatible with other protocols
- Use shielded twisted pair connection, and all wires are of the same specification.
-
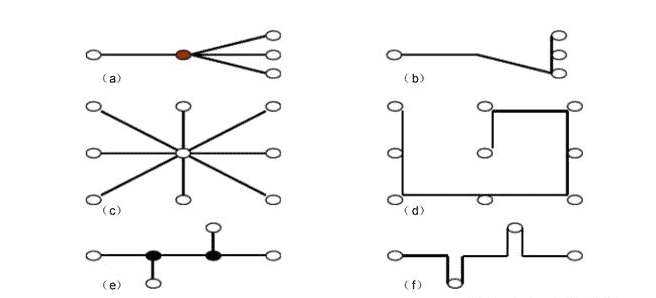
Inappropriate network connection can be normal in the case of short distance and low speed, but if the communication distance is lengthened and the speed is increased, different problems may occur, so the wiring should be connected according to the structure of b, d, f
-
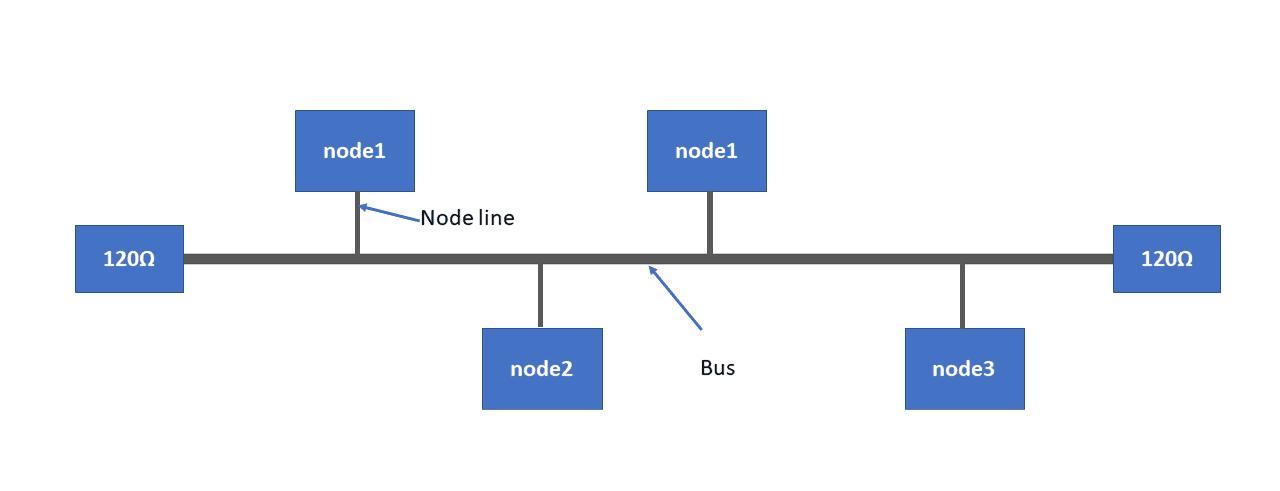
Depending on the situation, both ends of the bus should be connected to a matching resistance of 120 ohms.
During the wiring process, the contacts should be reduced as much as possible, so that the contacts are stable and not moving, and at the same time, they should be bandaged to avoid oxidation.