- Welcome to Pulse Robot
- +86-23-63207381
- +8613677602178
- sales@pusirobot.com
How to Set the Acceleration and Deceleration Time of Stepping Motor
In conventional applications, stepper motor acceleration and deceleration need not be set up. Through stepper motor driver, pulse can be sent to the motor to make the motor run directly. But in some cases, slow start and stop of the motor is needed, which requires adjustment of acceleration and deceleration.
There are generally two kinds of acceleration and deceleration of stepping motor, one is ladder acceleration and deceleration, the other is S-curve acceleration and deceleration.
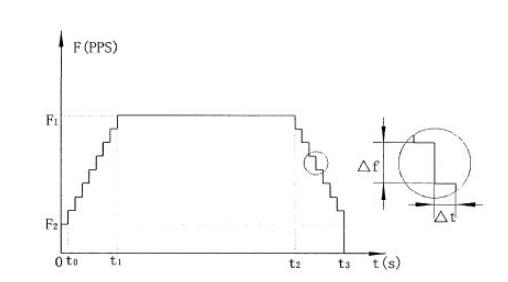
Trapezoidal acceleration and deceleration: The following figure is a ladder acceleration and deceleration curve. The ladder transformation of speed path can meet the requirements of general application scenarios, but because of the ladder transformation of speed, it can not meet the requirements in some occasions where the stability of motor operation is high.
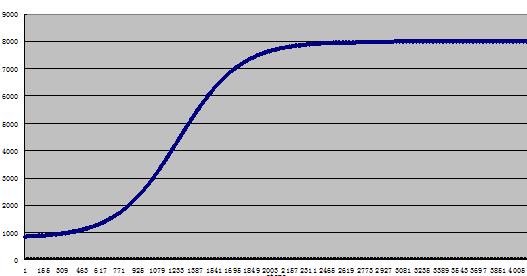
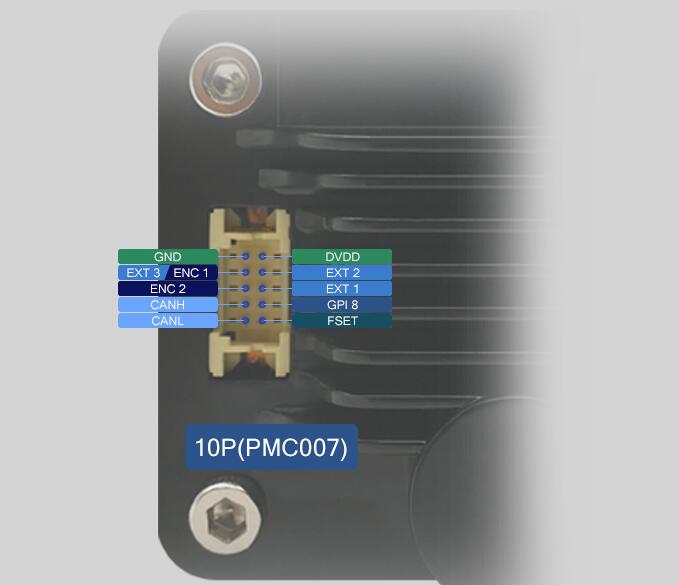
S-shaped curve accelerator and decelerator: The following figure is S-shaped curve acceleration and deceleration curve, the speed range S-shaped curve changes smoothly. To achieve this change in speed curve, the requirements of stepper motor driver are higher. The acceleration and deceleration curve can almost adapt to all application scenarios of stepper motors. Take PMC007 series small stepper motor driver as an example. Describe the setting of acceleration and deceleration time of S-curve
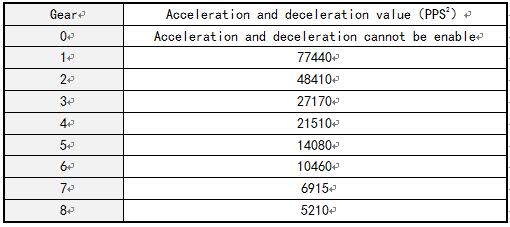
As shown in the following figure, the acceleration and deceleration time of PMC007 series bus small stepper motor driver is divided into eight grades, corresponding to the acceleration and deceleration coefficient of 1-8, the greater the value, the longer the acceleration and deceleration time.
There are two ways to set parameters. One can be set on the computer by the PUSICAN debugging software shown below.
The second is to send instructions directly through CANopen interface of PMC007 series small stepper motor driver.
Origin of the article:en.pusirobot.com