




Nema17/23/34 Micro Modbus stepper motor controller PMC007BxS
$63.00 – $69.00
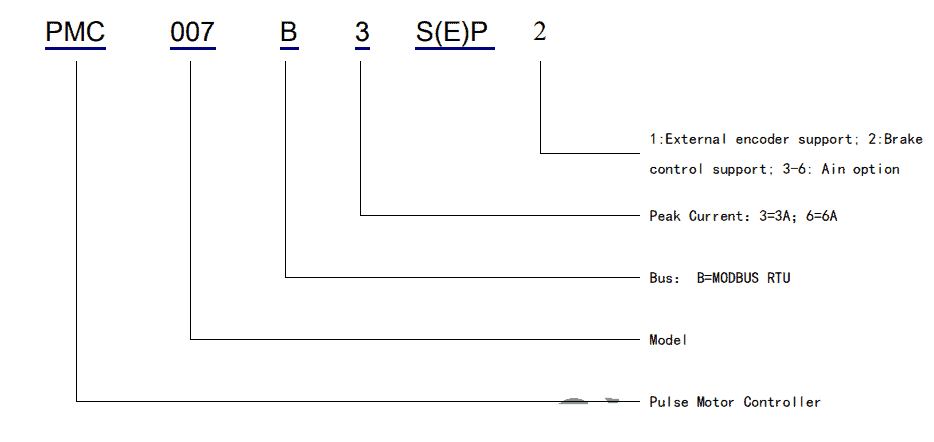
Tips: PMC007BXSP2 is for open loop motor, which doesn’t support the encoder. If you want to use an encoder, please choose PMC007BXSEP2 which is for closed-loop motor.
Nema17/23/34 Micro Modbus stepper motor controller PMC007BxS
Description
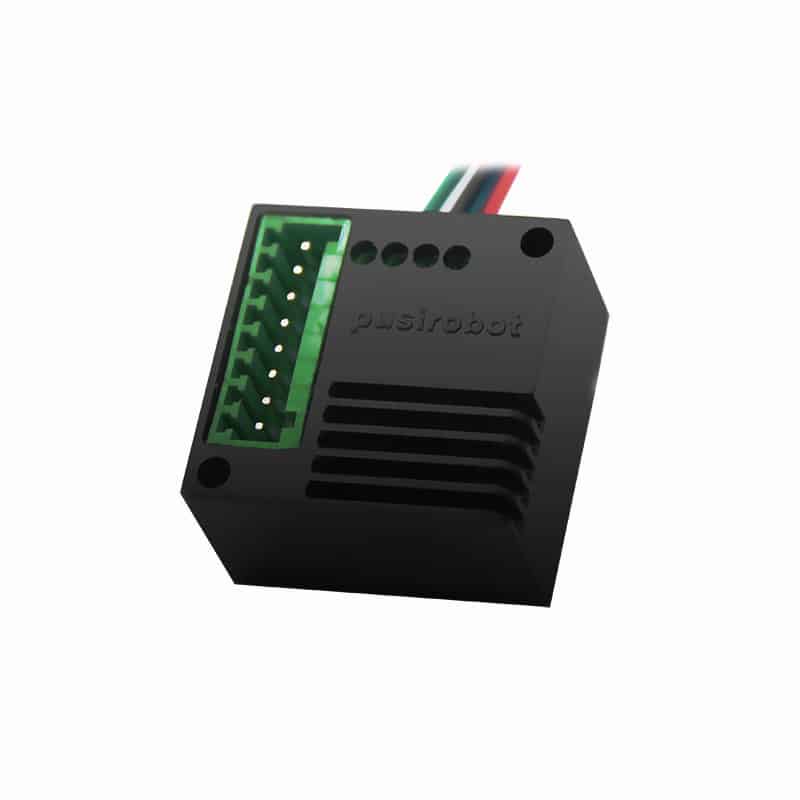
PMC007BxSxP is a kind of miniature integrated stepper motor microstepping controller, which can be directly installed in the rear of 42/57/86 series stepper motor. The series controller provides a variety of models which can be chosen based on bus control of modbus-RTU and different current value. It is easy to achieve industrial control network of as many as 120 nodes, which can achieve closed-loop control based on encoder according to the requirements of user. PMC007BxSxP adopts industrial standard modbus-RTU control protocol, which not only greatly simplifies the complexity of the upper layer control system, but also maximally reserves flexibility of control, and is suitable for all kinds of high precision, wide range of industry using.
Technical data
General
|
PMC007 bus series
|
|
| Host |
PC,PLC,MCU
|
| Support motor |
2-phase stepper motor
|
| The development environment |
VC C# Labviwe VB Linux Python
|
| The power supply voltage |
DC12-48V
|
| Output Current |
DC 0.4-6A |
| Microstepping |
0/256 adjustable
|
| Temperature |
-40℃~80℃
|
| Maximum pulse frequency |
200K
|
| Durability |
Over 20,000 hours
|
The input
| General I/O |
Description
|
| IO function |
Emergency stop input, brake control, digital input/output, analog input, factory reset, 5V output
|
| The input specifications |
Digital input voltage: 0-5V
Analog speed regulation input voltage: 0-3.3V Emergency stop input voltage: 0-24V |
Control mode
|
|
Description
|
| Control mode |
Position mode, speed mode, PV mode, PP mode, PVT mode, analog speed regulation, analog positioning, synchronous positioning
|
| Mode switching |
Specified instruction switching
|
Communication
|
Description
|
|
| Protocol |
MODBUS
|
| Baud rate |
4800/9600/19200/38400/51200/115200bps
|
Download
| CAD |
.DWG
|
| 3D file |
.STP
|
| The user manual | |
| Debug software |
Selection guide
Selection guide
| Weight | 0.5 kg |
|---|---|
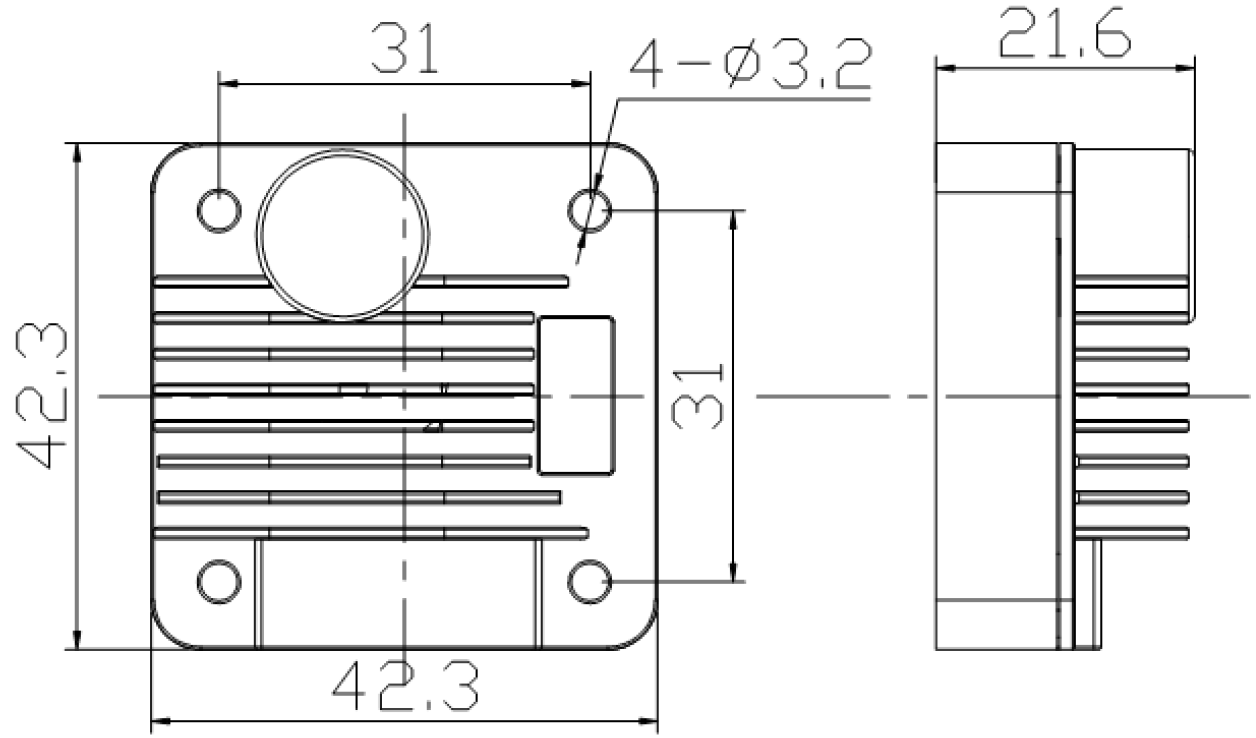
| Dimensions | 4.23 × 4.23 × 2.16 cm |
| Controller model | PMC007B3SEP2, PMC007B3SP2, PMC007B6SEP2, PMC007B6SP2 |
You must be logged in to post a review.
Related products
-
Micro Modbus Five-axis stepper motor controller PMC005Bx
$92.00 – $99.00 -
NEMA11 Canbus Micro stepper motor driver PMC007C2
$45.00 – $52.00


Reviews
There are no reviews yet.