- Welcome to Pulse Robot
- +86-23-63207381
- +8613677602178
- sales@pusirobot.com
NEMA11 integrated open loop stepper motor

PMC006x2
Main characteristics
Technical data
General
|
Nema11 open-loop stepper motor series
|
|
| Host |
PC,PLC,MCU
|
| Support motor |
2-phase 4-wire 1.8°/0.9° stepper motor
|
| The development environment |
VC C# Labviwe VB Linux Python
|
| The power supply voltage |
DC 9-36V
|
| Motor Current |
DC 0.7A L=30mm |
| Microstepping |
0/2/4/8/16/32/64/128 adjustable
|
| Temperature |
-40℃~80℃
|
| Incremental resolution |
Suppport external 200-8000PPR(Default 4000)
|
| Absolute resolution |
12 bit single-turn/multi-turn absolute encoder
|
| Holding torque |
0.06N.m L=30mm
0.08N.m L=40mm 0.12N.m L=50mm |
| Durability |
Over 20,000 hours
|
The input
| General I/O |
NEMA11 bus series
|
| I/O function |
Emergency stop input, digital input/output, analog input, 5V output, external encoder
|
| The input specifications |
Digital input voltage: 0 to 5V
Analog speed regulation input voltage: 0-3.3v Emergency stop input voltage:0-5V |
Control mode
|
|
Description
|
| Control mode |
Support Position/Velocity/PP/PV/SP/Analog Position/Analog velocity mode etc. motion mode
|
| Mode switching |
Specified instruction switching
|
Communication
|
Description
|
|
| Protocol |
CANopen DS301 / MODbus-RTU
|
| Baud rate |
5K-1M bps/9600-115200 bps adjustable
|
Dimensions
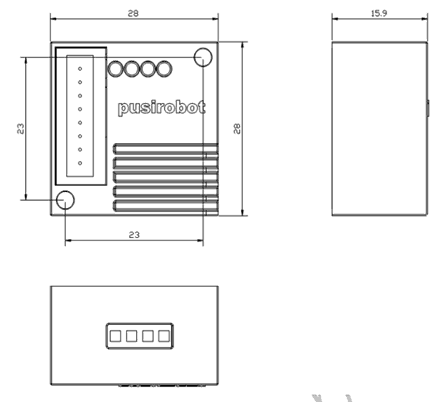
Download
| CAD |
.DWG
|
| 3D file |
.STP(Contact customer service)
|
| The user manual | |
| Debug software | Development documentation | Certification |
Functional features
| Function |
Description
|
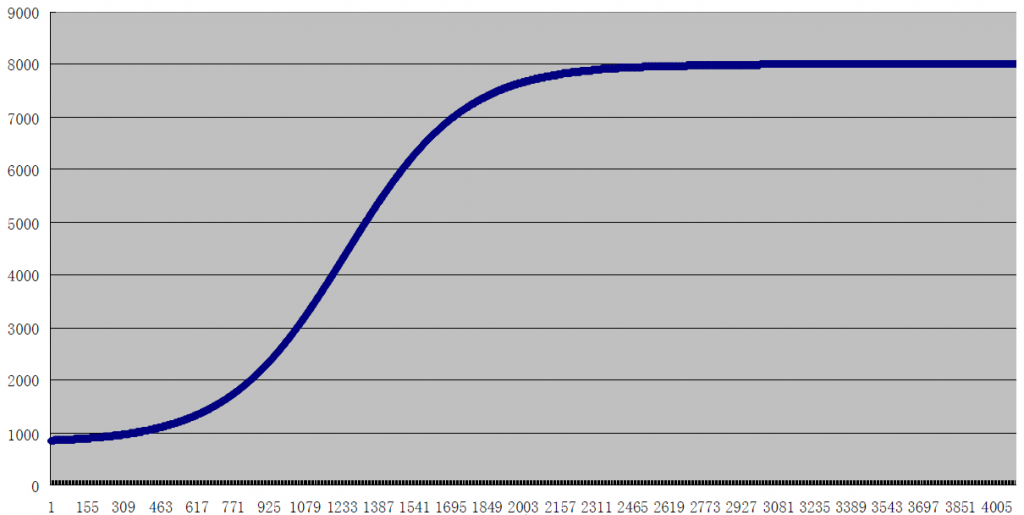
| S-curve acceleration and deceleration automatic control |
Support separate configuration of starting speed, stopping speed, acceleration and deceleration. Acceleration and deceleration support 8-gear control. Acceleration and deceleration simulation diagram is as follows
|
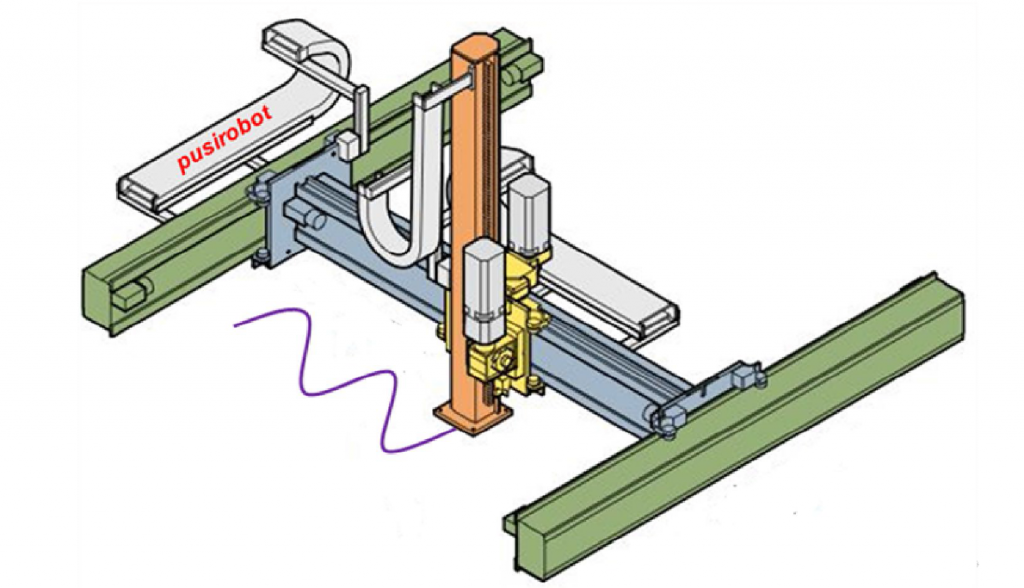
| PVT multi-axis interpolation |
It supports precise control of the position and speed of multiple axes on the same time coordinate, so that the end mechanism can realize straight line, arc and complex curve motion trajectory, as shown in the figure below
|
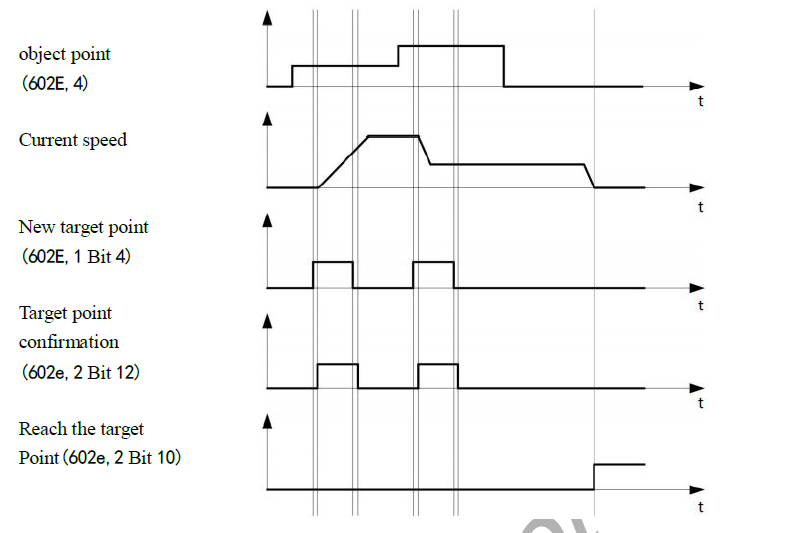
| PP model |
In the process of PP mode operation, a set of new parameters can be written by the host computer. It can be selected to smooth the transition from the previous operation parameters to the new parameters, or to run with the new parameters after the operation of the old parameters, as shown in the figure below
|
{kind=link}