- Welcome to Pulse Robot
- +86-23-63207381
- +8613677602178
- sales@pusirobot.com
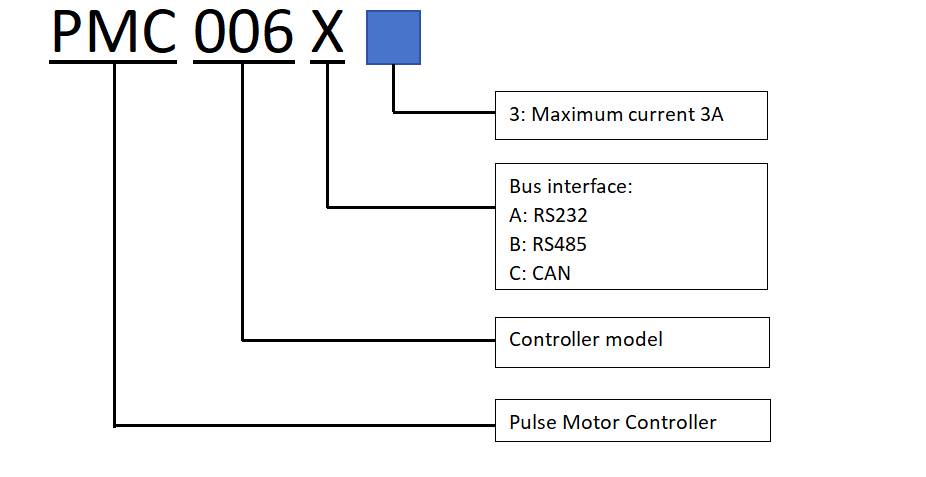
Nema17 Integrated stepper motor PMC006x3s

PMC006x3S
NEMA 17
L=33mm 0.28N.m
L=40mm 0.40N.m
L=47mm 0.50N.m
L=60mm 0.65N.m
Description
The PUSI's multi-turn absolute integrated stepper motor PMC006x3SEP2M adopts the latest patented technology from PUSI. It can optionally support multi-turn absolute encoders, single-turn absolute encoders, and 200-4000PPR incremental encoders. The motor has no lost steps, high-precision control and memory for power-down position, no change is required, no sensor is used; It provides CAN-based bus control And a variety of models with different current levels, it is easy to implement an industrial control network system with up to 120 nodes, which not only greatly simplifies the complexity of the upper-level control system, but also retains the control flexibility to the greatest extent, suitable for various high precision, wide range of industrial applications.
Technical data
General
|
Nema17 closed-loop stepper motor series
|
|
| Host |
PC,PLC,MCU
|
| Support motor |
2-phase 4-wire 1.8°/0.9° stepper motor
|
| The development environment |
VC C# Labviwe VB Linux Python
|
| The power supply voltage |
DC 12-48V
|
| Motor Current |
DC 1.2A L=33mm |
| Microstepping |
0/2/4/8/16/32/64/128 adjustable
|
| Temperature |
-40℃~80℃
|
| Incremental resolution |
Suppport external 200-8000PPR(Default 4000)
|
| Absolute resolution |
14 bit single-turn/multi-turn absolute encoder
|
| Holding torque |
0.25N.m L=33mm
0.36N.m L=40mm 0.45N.m L=47mm 0.70N.m L=60mm |
| Durability |
Over 20,000 hours
|
The input
| General I/O |
NEMA17 Absolute Integrated Stepper Motor Series
|
| IO function |
External stop input, brake control, digital input/output, analog input, factory reset, 5V output, digital ground
|
| The input specifications |
Digital input voltage: 0-5V
Analog speed regulation input voltage: 0-3.3V External stop input voltage: 0-24V |
Control mode
|
|
NEMA17 Absolute Integrated Stepper Motor Series
|
| Control mode |
Position mode, speed mode, PV mode, PP mode, high-speed torque mode, analog speed control/positioning, synchronous positioning
|
| Mode switching |
Specified instruction switching
|
Communication
|
NEMA17 Absolute Integrated Stepper Motor Series
|
|
| Protocol |
CANopen DS301/Modbus-RTU
|
| Baud rate |
5k-1M bps continuously adjustable / 9.6K-115.2K bps adjustable
|
Download
| CAD |
.DWG
|
| 3D file |
.STP(Contact customer service)
|
| The user manual | |
| Debug software | |
| Development documentation | |
| Certification |
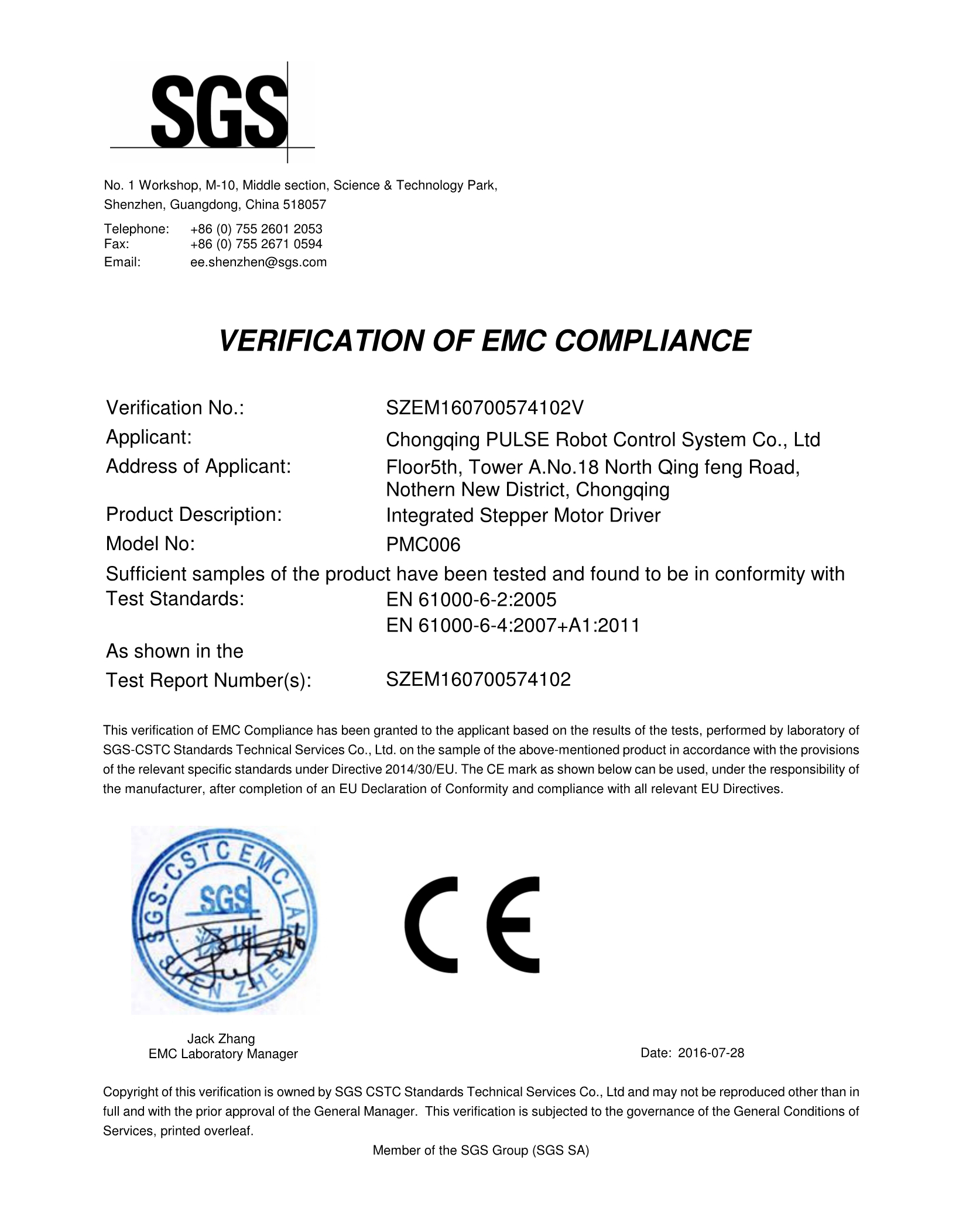{kind=link}
Selection guide
Functional features
| Function |
Description
|
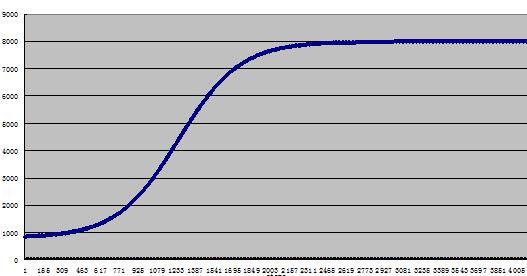
| S-curve acceleration and deceleration automatic control |
Support separate configuration of starting speed, stopping speed, acceleration and deceleration. Acceleration and deceleration support 8-gear control. Acceleration and deceleration simulation diagram is as follows
 |
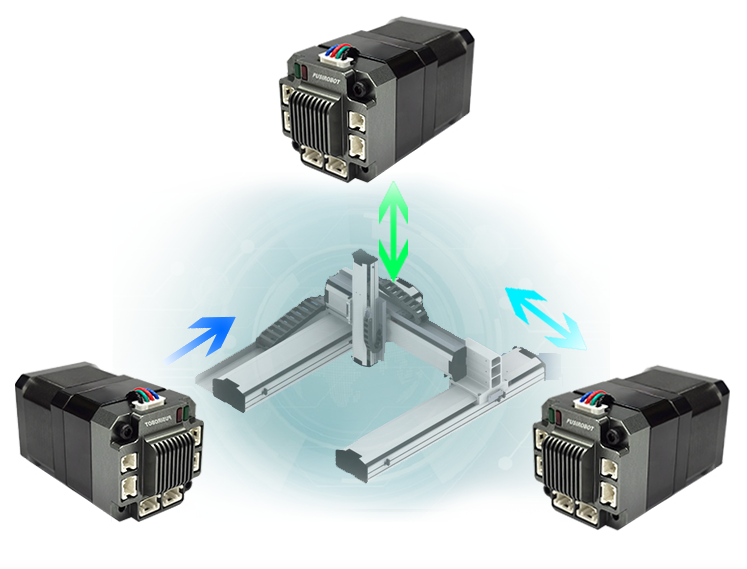
| Multi-axis motion control |
Maximum retention control precision
|